3 - Hallucinations
According to the sensor fusion literature for conventional cameras, the main strategies for combining stereo images with sparse depth measurements from active sensors consist of i) concatenating the two modalities and processing them as joint inputs with a stereo network, ii) modulating the internal cost volume computed by the backbone itself or, more recently, iii) projecting distinctive patterns on images according to depth hints.
We follow the latter path, since it is more effective and flexible than the alternatives -- which can indeed be applied to white box frameworks only.
For this purpose, we design two alternative strategies suited even for gray and black box frameworks.
-
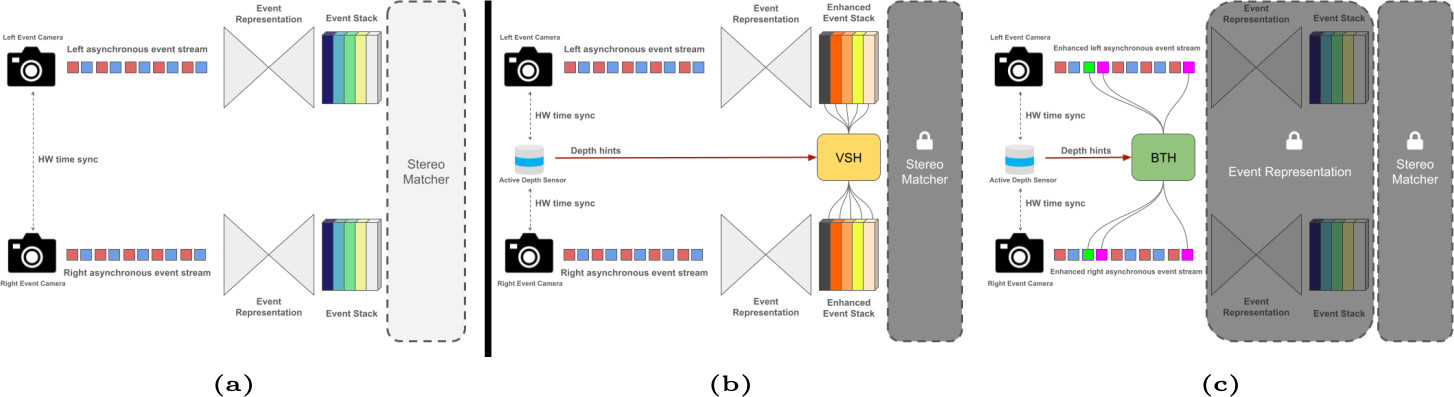
Virtual Stack Hallucination -- VSH: Given left and right stacks $\mathcal{S}_L,\mathcal{S}_R$ of size W$\times$H$\times$C and a set $Z$ of depth measurements $z(x,y)$ by a sensor, we perform a Virtual Stack Hallucination (VSH), by augmenting each channel $c\in\text{C}$, to increase the distinctiveness of local patterns and thus ease matching. This is carried out by injecting the same virtual stack $\mathcal{A}(x,y,x',c)$ into $\mathcal{S}_L,\mathcal{S}_R$ respectively at coordinates $(x,y)$ and $(x',y)$.
$$\mathcal{S}_L(x,y,c) \leftarrow \mathcal{A}(x,y,x',c)$$
$$\mathcal{S}_R(x',y,c) \leftarrow \mathcal{A}(x,y,x',c)$$
with $x'$ obtained as $x-d(x,y)$, with disparity $d(x,y)$ triangulated back from depth $z(x,y)$ as $\frac{bf}{z(x,y)}$, according to the baseline and focal lengths $b,f$ of the stereo system.
We deploy a generalized version of the random pattern operator $\mathcal{A}$ proposed in VPP, agnostic to the stacked representation:
$$\mathcal{A}(x,y,x',c) \sim \mathcal{U}(\mathcal{S}^-, \mathcal{S}^+)$$
with $\mathcal{S}^-$ and $\mathcal{S}^+$ the minimum and maximum values appearing across stacks $\mathcal{S}_L,\mathcal{S}_R$ and $\mathcal{U}$ a uniform random distribution.
Following VPP, the pattern can either cover a single pixel or a local window.
This strategy alone is sufficient already to ensure distinctiveness and to dramatically ease matching across stacks, even more than with color images, since acting on semi-dense structures -- i.e.,, stacks are uninformative in the absence of events. It also ensures a straightforward application of the same principles used on RGB images, e.g.,, to combine the original content (color) with the virtual projection (pattern) employing alpha blending.
Nevertheless, we argue that acting at this level i) requires direct access to the stacks, i.e., a gray-box deep event-stereo network, and ii) might be sub-optimal as stacks encode only part of the information from streams.
-
Back-in-Time Hallucination -- BTH: A higher distinctiveness to ease correspondence can be induced by hallucinating patterns directly in the continuous events domain.
Specifically, we act in the so-called event history: given a timestamp $t_d$ at which we want to estimate disparity, raw events are sampled from the left and right streams starting from $t_d$ and going backward, according to either SBN or SBT stacking approaches, to obtain a pair of event histories $\mathcal{E}_L = \left\{ e^L_k \right\}^{N}_{k=1}$ and $\mathcal{E}_R = \left\{ e^R_k \right\}^{M}_{k=1}$, where $e^L_k,e^R_k$ are the $k$-th left and right events.
Events in the history are sorted according to their timestamp -- i.e.,, inequality $t_k \leq t_{k+1}$ holds for every two adjacent $e_{k},e_{k+1}$.
At this point, we intervene to hallucinate novel events: given a depth measurement $z(\hat{x},\hat{y})$, triangulated back into disparity $d(\hat{x},\hat{y})$, we inject a pair of fictitious events $\hat{e}^L=(\hat{x},\hat{y},\hat{p},\hat{t})$ and $\hat{e}^R=(\hat{x}',\hat{y},\hat{p},\hat{t})$ respectively inside $\mathcal{E}_L$ and $\mathcal{E}_R$, producing $\hat{\mathcal{E}}_L=\left\{e^L_1,\dots,\hat{e}^L,\dots,e^L_N\right\}$ and $\hat{\mathcal{E}}_R=\left\{e^R_1,\dots,\hat{e}^R,\dots,e^R_M\right\}$.
By construction, $\hat{e}^L$ and $\hat{e}^R$ adhere to i) the time ordering constraint, ii) the geometry constraint $\hat{x}'=\hat{x}-d(\hat{x},\hat{y})$ and iii) a similarity constraint -- i.e.,, $\hat{p},\hat{t}$ are the same for $\hat{e}^L$ and $\hat{e}^R$.
Fictitious polarity $\hat{p}$ and fictitious timestamp $\hat{t}$ are two degrees of freedom useful to ensure distinctiveness along the epipolar line and ease matching, according to which we can implement different strategies, and detailed in the remainder.
 |
|
Overview of Back-in-Time Hallucination (BTH). To estimate disparity at $t_d$, if LiDAR data is available -- e.g., at timestamp $t_z=t_d$ (green) or $t_z=t_d-15$ (yellow) -- we can naively inject events of random polarities at the same timestamp $t_z$ (a).
More advanced injection strategies can be used -- e.g., by hallucinating multiple events, starting from $t_d$, back-in-time at regular intervals (b).
|
Single-timestamp injection: The simplest way to increase distinctiveness is to insert synchronized events at a fixed timestamp.
Accordingly, for each depth measurement $d(\hat{x},\hat{y})$, a total of $K_{\hat{x},\hat{y}}$ pairs of fictitious events are inserted in $\mathcal{E}_L,\mathcal{E}_R$, having polarity $\hat{p}_k$ randomly chosen from the discrete set $\left\{-1,1\right\}$. Timestamp $\hat{t}$ is fixed and can be, for instance, $t_z$ at which the sensor infers depth, that can coincide with timestamp $t_d$ at which we want to estimate disparity -- e.g.,, $t_z=t_d=0$ in the case (a). Inspired by , events might be optionally hallucinated in patches rather than single pixels.
However, as depth sensors usually work at a fixed acquisition frequency -- e.g.,, 10Hz for LiDARs -- sparse points might be unavailable at any specific timestamp. Nonetheless, since $\mathcal{E}_L,\mathcal{E}_R$ encode a time interval, we can hallucinate events even if derived from depth scans performed in the past -- e.g.,, at $t_z < t_d$, -- by placing them in the proper position inside $\mathcal{E}_L,\mathcal{E}_R$.
Repeated injection: The previous strategy does not exploit one of the main advantages of events over color images, i.e., the temporal dimension, at its best. Purposely, we design a more advanced hallucination strategy based on repeated naive injections performed along the time interval sampled by $\mathcal{E}_L, \mathcal{E}_R$.
As long as we are interested in recovering depth at $t_d$ only, we can hallucinate as many events as we want in the time interval before $t$ -- i.e.,, for $t_z=t_d=0$, over the entire interval as shown in (b) -- consistent with the depth measurements at $t_d$ itself, which will increase the distinctiveness in the event histories and will ease the match by hinting the correct disparity.
We can design a strategy for injecting multiple events along the stream.
Accordingly, we define the conservative time range $\left[t^-,t^+\right]$ of the events histories $\mathcal{E}_L, \mathcal{E}_R$, with $t^-=\min\left\{t^L_0,t^R_0\right\}$ and $t^+=\max\left\{t^L_N,t^R_M\right\}$ and divide it into $B$ equal temporal bins.
Then, inspired by MDES, we run $B$ single-timestamp injections at $\hat{t}_b=\frac{2^b-1}{2^b}(t^+-t^-)+t^-$, with $b \in \left\{1,\dots,B\right\}$. %$\hat{t}_b=\frac{2^b-1}{2^b}\Delta t+t^-$.
Additionally, each depth measurement is used only once -- i.e.,, the number of fictitious events $K_{b,\hat{x},\hat{y}}$ in the $b$-th injection is set as $K_{b,\hat{x},\hat{y}} \leftarrow K_{\hat{x},\hat{y}}\delta(b,D_{\hat{x},\hat{y}})$ where $\delta(\cdot,\cdot)$ is the Kronecker delta and $D_{\hat{x},\hat{y}}\leftarrow\text{round}(X^\mathcal{U}(B-1)+1)$ is a random slot assignment.
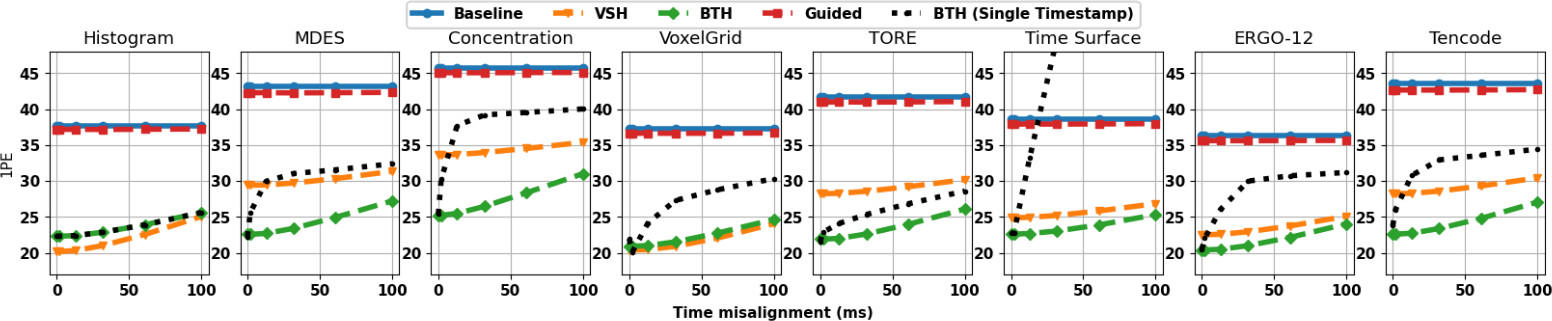
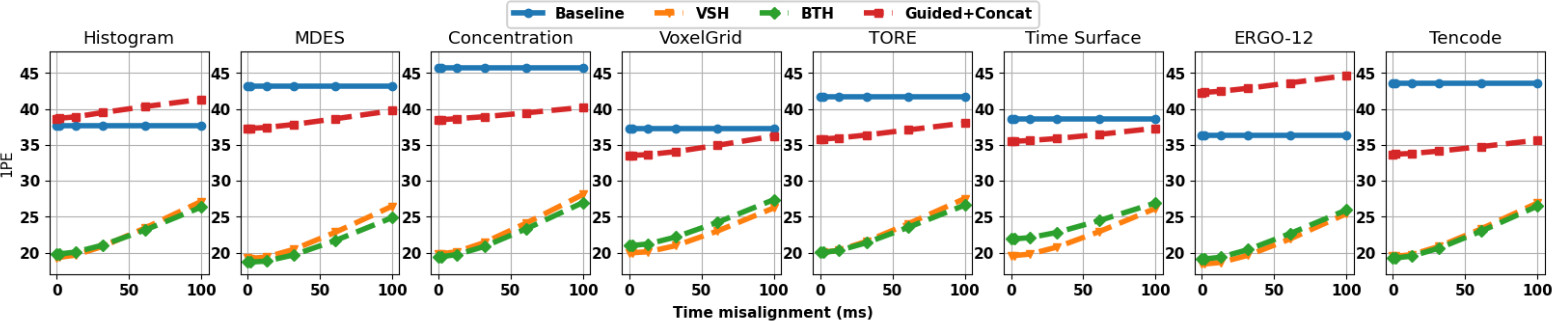
We will show in our experiment how this simple strategy can improve the results of BTH, in particular increasing its robustness against misaligned LiDAR data -- i.e., measurements retrieved at a timestamp $t_z < t_d$.
|